In the following text, we will abbreviate the dot product of a vector with itself using exponent notation , i.e.
v ⃗ 2 ≔ v ⃗ ⋅ v ⃗ \vec{v}^2 \coloneqq \vec{v} \cdot \vec{v} v 2 : = v ⋅ v Introduction
The dot-product takes two vectors and returns the sum of the component-wise products of the vector's components. Given two vectors
a ⃗ , b ⃗ ∈ R n , a ⃗ = ( a 1 a 2 ⋮ a n ) , b ⃗ = ( b 1 b 2 ⋮ b n )
\vec{a}, \vec {b} \in \mathbb{R}^n, \vec{a} = \begin{pmatrix} a_1 \\ a_2 \\ \vdots \\ a_{n} \end{pmatrix}, \vec{b} = \begin{pmatrix} b_1 \\ b_2 \\ \vdots \\ b_{n} \end{pmatrix}
a , b ∈ R n , a = a 1 a 2 ⋮ a n , b = b 1 b 2 ⋮ b n the dot product yields a scalar value.
a ⃗ ⋅ b ⃗ = ∑ i = 1 n a i b i
\vec{a} \boldsymbol{\cdot} \vec{b} = \sum_{i=1}^{n} a_ib_i
a ⋅ b = i = 1 ∑ n a i b i Geometric Interpretation
If a ⃗ ⋅ b ⃗ = 0 \vec{a} \boldsymbol{\cdot} \vec{b} = 0 a ⋅ b = 0
Orthogonality of Unit Vectors
We will first have a look at a special case, namely when a ⃗ , b ⃗ \vec{a}, \vec{b} a , b unit vectors .
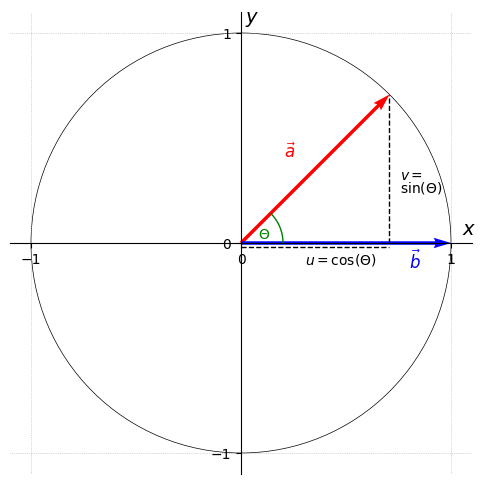
In Figure 1 , the radius of the unit circle is represented by the vectors a ⃗ \vec{a} a b ⃗ \vec{b} b a ⃗ \vec{a} a b ⃗ \vec{b} b
∣ a ⃗ ∣ = 1 ∣ b ⃗ ∣ = 1
|\vec{a}| = 1 \\
|\vec{b}| = 1
∣ a ∣ = 1 ∣ b ∣ = 1 Figure 1 Unit Circle with two vectors a and b, which both have a magnitude of 1
Plot-Code (Python) import matplotlib . pyplot as plt import numpy as np from matplotlib . patches import Arc fig , ax = plt . subplots ( figsize = ( 6 , 6 ) ) ax . set_xlim ( - 1.1 , 1.1 ) ax . set_ylim ( - 1.1 , 1.1 ) ax . set_xticks ( [ - 1 , 0 , 1 ] ) ax . set_yticks ( [ - 1 , 0 , 1 ] ) ax . set_aspect ( 'equal' ) ax . grid ( True , linestyle = ':' , linewidth = 0.5 ) for spine in ax . spines . values ( ) : spine . set_visible ( False ) ax . spines [ 'bottom' ] . set_position ( 'zero' ) ax . spines [ 'left' ] . set_position ( 'zero' ) ax . spines [ 'bottom' ] . set_visible ( True ) ax . spines [ 'left' ] . set_visible ( True ) ax . xaxis . set_ticks_position ( 'bottom' ) ax . yaxis . set_ticks_position ( 'left' ) ax . text ( 1.05 , 0.02 , r"$x$" , fontsize = 14 , va = 'bottom' ) ax . text ( 0.02 , 1.05 , r"$y$" , fontsize = 14 , ha = 'left' ) origin = np . array ( [ 0 , 0 ] ) theta = np . radians ( 45 ) cos_theta = np . cos ( theta ) sin_theta = np . sin ( theta ) opposite = np . array ( [ 0 , np . sin ( theta ) ] ) v1 = np . array ( [ np . cos ( theta ) , np . sin ( theta ) ] ) v2 = np . array ( [ 1 , 0 ] ) ax . quiver ( * origin , * v1 , angles = 'xy' , scale_units = 'xy' , scale = 1 , color = 'r' ) ax . quiver ( * origin , * v2 , angles = 'xy' , scale_units = 'xy' , scale = 1 , color = 'b' ) offset = 0.01 ax . text ( v1 [ 0 ] - 0.5 , v1 [ 1 ] - 0.3 , r"$\vec{a}$" , fontsize = 12 , color = 'r' ) ax . text ( v2 [ 0 ] - 0.2 , v2 [ 1 ] - 0.12 , r"$\vec{b}$" , fontsize = 12 , color = 'b' ) ax . plot ( [ 0 , cos_theta ] , [ - 0.02 , - 0.02 ] , color = 'black' , linestyle = '--' , linewidth = 1 ) ax . text ( cos_theta / 2 - 0.05 , - 0.1 , r"$\cos(\Theta)$" , fontsize = 10 ) start = np . array ( [ cos_theta , 0 ] ) end = start + opposite ax . plot ( [ start [ 0 ] , end [ 0 ] ] , [ start [ 1 ] , end [ 1 ] ] , color = 'black' , linewidth = 1 , linestyle = '--' ) ax . text ( cos_theta + 0.05 , sin_theta / 2 - 0.05 , r"$\sin(\Theta)$" , fontsize = 10 ) circle = plt . Circle ( ( 0 , 0 ) , 1 , color = 'black' , linewidth = 0.5 , fill = False , transform = ax . transData ) ax . add_patch ( circle ) angle_deg = np . degrees ( np . arccos ( np . dot ( v1 , v2 ) ) ) arc = Arc ( origin , 0.4 , 0.4 , angle = 0 , theta1 = 0 , theta2 = angle_deg , edgecolor = 'green' ) ax . add_patch ( arc ) ax . text ( 0.08 , 0.02 , r"$\Theta$" , color = 'green' ) plt . show ( ) Clearly, b ⃗ = ( 1 0 ) \vec{b} = \begin{pmatrix} 1 \\ 0 \end{pmatrix} b = ( 1 0 )
Additionally a ⃗ = ( c o s ( Θ ) s i n ( Θ ) ) \vec{a} = \begin{pmatrix} cos(\Theta) \\ sin(\Theta) \end{pmatrix} a = ( cos ( Θ ) s in ( Θ ) )
the cosine represents the quotient of the adjacent side and the hypothenuse: c o s ( Θ ) = u ∣ a ⃗ ∣ cos(\Theta) = \frac{u}{|\vec{a}|} cos ( Θ ) = ∣ a ∣ u
the sine represents the quotient of the opposite side and the hypothenuse: s i n ( Θ ) = v ∣ a ⃗ ∣ sin(\Theta) = \frac{v}{|\vec{a}|} s in ( Θ ) = ∣ a ∣ v
Solving for u u u v v v
c o s ( Θ ) ∣ a ⃗ ∣ = c o s ( Θ ) ⋅ 1 = c o s ( Θ ) = u s i n ( Θ ) ∣ a ⃗ ∣ = s i n ( Θ ) ⋅ 1 = s i n ( Θ ) = v
cos(\Theta) |\vec{a}| = cos(\Theta) \cdot 1 = cos(\Theta) = u\\
sin(\Theta) |\vec{a}| = sin(\Theta) \cdot 1 = sin(\Theta) = v cos ( Θ ) ∣ a ∣ = cos ( Θ ) ⋅ 1 = cos ( Θ ) = u s in ( Θ ) ∣ a ∣ = s in ( Θ ) ⋅ 1 = s in ( Θ ) = v For Θ = 90 ° \Theta = 90 \degree Θ = 90° c o s ( 90 ) = 0 cos(90) = 0 cos ( 90 ) = 0
Orthogonality of Vectors with arbitrary length
Let's take a look at the common case when a ⃗ \vec{a} a b ⃗ \vec{b} b Law of Cosine :
c 2 = a 2 + b 2 − 2 a b cos ( Θ )
c^2 = a^2 + b^2 - 2ab \cos(\Theta)
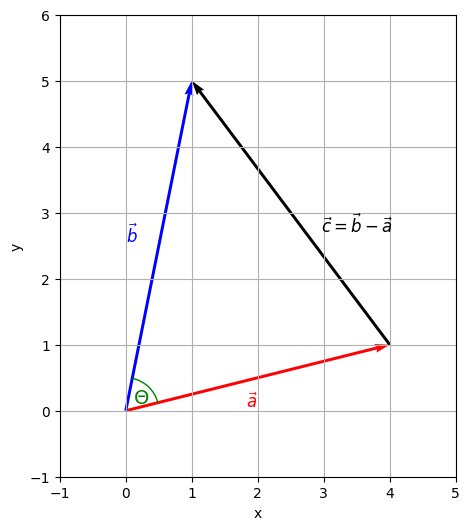
c 2 = a 2 + b 2 − 2 ab cos ( Θ ) This relationship is shown in Figure 2
Figure 2 Three vectors a, b, c. The angle Theta between a and b can be calculated with the help of the dot-product.
Plot-Code (Python) import numpy as np import matplotlib . pyplot as plt from matplotlib . patches import Arc a = np . array ( [ 4 , 1 ] ) b = np . array ( [ 1 , 5 ] ) c = b - a a_len = np . linalg . norm ( a ) b_len = np . linalg . norm ( b ) dot_prod = np . dot ( a , b ) cos_theta = dot_prod / ( a_len * b_len ) theta_rad = np . arccos ( cos_theta ) theta_deg = np . degrees ( theta_rad ) angle_a = np . degrees ( np . arctan2 ( a [ 1 ] , a [ 0 ] ) ) theta1 = angle_a theta2 = angle_a + theta_deg fig , ax = plt . subplots ( figsize = ( 6 , 6 ) ) ax . quiver ( 0 , 0 , a [ 0 ] , a [ 1 ] , angles = 'xy' , scale_units = 'xy' , scale = 1 , color = 'red' ) ax . text ( a [ 0 ] / 2 , a [ 1 ] / 2 - 0.5 , r'$\vec{a}$' , color = 'red' , fontsize = 12 , ha = 'right' , va = 'bottom' ) ax . quiver ( 0 , 0 , b [ 0 ] , b [ 1 ] , angles = 'xy' , scale_units = 'xy' , scale = 1 , color = 'blue' ) ax . text ( b [ 0 ] / 2 - 0.5 , b [ 1 ] / 2 , r'$\vec{b}$' , color = 'blue' , fontsize = 12 , ha = 'left' , va = 'bottom' ) ax . quiver ( a [ 0 ] , a [ 1 ] , c [ 0 ] , c [ 1 ] , angles = 'xy' , scale_units = 'xy' , scale = 1 , color = 'black' ) ax . text ( a [ 0 ] + c [ 0 ] / 2 + 1 , a [ 1 ] + c [ 1 ] / 2 , r'$\vec{c} = \vec{b} - \vec{a}$' , color = 'black' , fontsize = 12 , ha = 'center' , va = 'top' ) arc = Arc ( ( 0 , 0 ) , 1.0 , 1.0 , angle = 0 , theta1 = theta1 , theta2 = theta2 , edgecolor = 'green' ) ax . add_patch ( arc ) ax . text ( 0.11 , 0.11 , r"$\Theta$" , color = 'green' , fontsize = 14 ) ax . set_xlim ( - 1 , 5 ) ax . set_ylim ( - 1 , 6 ) ax . set_aspect ( 'equal' ) ax . set_xlabel ( "x" ) ax . set_ylabel ( "y" ) ax . grid ( True ) plt . show ( ) First of all, let's substitute the variables with scalar values of our vectors a ⃗ , b ⃗ \vec{a}, \vec{b} a , b c ⃗ \vec{c} c
∣ c ⃗ ∣ 2 = ∣ a ⃗ ∣ 2 + ∣ b ⃗ ∣ 2 − 2 ∣ a ⃗ ∣ ∣ b ⃗ ∣ cos ( Θ )
|\vec{c}|^2 = |\vec{a}|^2 + |\vec{b}|^2 - 2|\vec{a}||\vec{b}| \cos(\Theta)
∣ c ∣ 2 = ∣ a ∣ 2 + ∣ b ∣ 2 − 2∣ a ∣∣ b ∣ cos ( Θ ) Note that c ⃗ = b ⃗ − a ⃗ \vec{c} = \vec{b} - \vec{a} c = b − a ∣ c ∣ 2 = c ⃗ 2 |c|^2 = \vec{c}^2 ∣ c ∣ 2 = c 2
( b ⃗ − a ⃗ ) 2 = ∣ a ⃗ ∣ 2 + ∣ b ⃗ ∣ 2 − 2 ∣ a ⃗ ∣ ∣ b ⃗ ∣ cos ( Θ )
(\vec{b} - \vec{a})^2 = |\vec{a}|^2 + |\vec{b}|^2 - 2|\vec{a}||\vec{b}| \cos(\Theta)
( b − a ) 2 = ∣ a ∣ 2 + ∣ b ∣ 2 − 2∣ a ∣∣ b ∣ cos ( Θ ) We will start with simplifying the terms:
− 2 ∣ a ⃗ ∣ ∣ b ⃗ ∣ cos ( Θ ) = ( b ⃗ − a ⃗ ) 2 − ∣ a ⃗ ∣ 2 − ∣ b ⃗ ∣ 2 = b ⃗ 2 − 2 a ⃗ b ⃗ + a ⃗ 2 − ∣ a ⃗ ∣ 2 − ∣ b ⃗ ∣ 2 = ∣ b ⃗ ∣ 2 − 2 a ⃗ b ⃗ + ∣ a ⃗ ∣ 2 − ∣ a ⃗ ∣ 2 − ∣ b ⃗ ∣ 2 = − 2 ⋅ ( a ⃗ ⋅ b ⃗ ) \begin{align*}
- 2|\vec{a}||\vec{b}| \cos(\Theta) &= (\vec{b} - \vec{a})^2 - |\vec{a}|^2 - |\vec{b}|^2 \\
&= \vec{b}^2 - 2 \vec{a}\vec{b} + \vec{a}^2 - |\vec{a}|^2 - |\vec{b}|^2 \\
&= |\vec{b}|^2 - 2 \vec{a}\vec{b} + |\vec{a}|^2 - |\vec{a}|^2 - |\vec{b}|^2 \\
&= - 2 \cdot (\vec{a} \boldsymbol{\cdot} \vec{b})
\end{align*} − 2∣ a ∣∣ b ∣ cos ( Θ ) = ( b − a ) 2 − ∣ a ∣ 2 − ∣ b ∣ 2 = b 2 − 2 a b + a 2 − ∣ a ∣ 2 − ∣ b ∣ 2 = ∣ b ∣ 2 − 2 a b + ∣ a ∣ 2 − ∣ a ∣ 2 − ∣ b ∣ 2 = − 2 ⋅ ( a ⋅ b ) Observe that the resulting term on the right side represents the dot product (set in parentheses for clarity).
Finally, solve for cos ( Θ ) \cos(\Theta) cos ( Θ )
− 2 ∣ a ⃗ ∣ ∣ b ⃗ ∣ cos ( Θ ) = − 2 a ⃗ b ⃗ ⇔ ∣ a ⃗ ∣ ∣ b ⃗ ∣ cos ( Θ ) = a ⃗ ⋅ b ⃗ ⇔ cos ( Θ ) = a ⃗ ⋅ b ⃗ ∣ a ⃗ ∣ ∣ b ⃗ ∣ \begin{alignat*}{}
& -2|\vec{a}||\vec{b}| \cos(\Theta) &&= - 2 \vec{a}\vec{b} \\
\Leftrightarrow \qquad & |\vec{a}||\vec{b}| \cos(\Theta) &&= \vec{a} \boldsymbol{\cdot} \vec{b} \\
\Leftrightarrow \qquad & \cos(\Theta) &&= \frac{\vec{a} \boldsymbol{\cdot} \vec{b}}{|\vec{a}||\vec{b}|} \\
\end{alignat*}{} ⇔ ⇔ − 2∣ a ∣∣ b ∣ cos ( Θ ) ∣ a ∣∣ b ∣ cos ( Θ ) cos ( Θ ) = − 2 a b = a ⋅ b = ∣ a ∣∣ b ∣ a ⋅ b Clearly, this holds for any vector except for a ⃗ = 0 ⃗ ∨ b ⃗ = 0 ⃗ \vec{a} = \vec{0} \lor \vec{b} = \vec{0} a = 0 ∨ b = 0
We can now solve for the dot product:
a ⃗ ⋅ b ⃗ = cos ( Θ ) ⋅ ∣ a ⃗ ∣ ∣ b ⃗ ∣ \begin{alignat*}{}
\vec{a} \boldsymbol{\cdot} \vec{b} = \cos(\Theta) \cdot |\vec{a}||\vec{b}|
\end{alignat*}{} a ⋅ b = cos ( Θ ) ⋅ ∣ a ∣∣ b ∣ The relation between the orthogonality of a ⃗ \vec{a} a b ⃗ \vec{b} b Θ = 90 ° \Theta = 90 \degree Θ = 90°
cos ( 90 ° ) = 0 = a ⃗ ⋅ b ⃗ ∣ a ⃗ ∣ ∣ b ⃗ ∣ \begin{alignat*}{}
\cos(90\degree) = 0 = \frac{\vec{a} \boldsymbol{\cdot} \vec{b}}{|\vec{a}||\vec{b}|}
\end{alignat*}{} cos ( 90° ) = 0 = ∣ a ∣∣ b ∣ a ⋅ b Since ∣ a ⃗ ∣ ≠ 0 ∧ ∣ b ⃗ ∣ ≠ 0 |\vec{a}| \neq 0 \land |\vec{b}| \neq 0 ∣ a ∣ = 0 ∧ ∣ b ∣ = 0 a ⃗ ⋅ b ⃗ = 0 \vec{a} \boldsymbol{\cdot} \vec{b} = 0 a ⋅ b = 0 equivalence :
a ⃗ ⋅ b ⃗ = 0 ⇔ cos ( Θ ) = 0 \vec{a} \boldsymbol{\cdot} \vec{b} = 0 \Leftrightarrow \cos(\Theta) = 0 a ⋅ b = 0 ⇔ cos ( Θ ) = 0 The dot product a ⃗ ⋅ b ⃗ = cos ( Θ ) ⋅ ∣ a ⃗ ∣ ∣ b ⃗ ∣ \vec{a} \boldsymbol{\cdot} \vec{b} = \cos(\Theta) \cdot |\vec{a}||\vec{b}| a ⋅ b = cos ( Θ ) ⋅ ∣ a ∣∣ b ∣ Θ \Theta Θ associativity of the dot product and scalar multiplication,
we can derive:
a ⃗ ⋅ b ⃗ ∣ a ⃗ ∣ ⋅ ∣ b ⃗ ∣ = ( a ⃗ ⋅ b ⃗ ) ⋅ 1 ∣ a ⃗ ∣ ⋅ ∣ b ⃗ ∣ = a ⃗ ⋅ 1 ∣ a ⃗ ∣ ⋅ b ⃗ ⋅ 1 ∣ b ⃗ ∣ = a ⃗ ∣ a ⃗ ∣ ⋅ b ⃗ ∣ b ⃗ ∣ \begin{align*}
\frac{\vec{a} \boldsymbol{\cdot} \vec{b}}{|\vec{a}| \cdot |\vec{b}|}
&= (\vec{a} \boldsymbol{\cdot} \vec{b}) \cdot \frac{1}{|\vec{a}| \cdot |\vec{b}|}\\[1.2em]
&= \vec{a} \cdot \frac{1}{|\vec{a}|} \cdot \vec{b} \cdot \frac{1}{|\vec{b}|}\\[1.2em]
&= \frac{\vec{a}}{|\vec{a}|} \cdot \frac{\vec{b}}{|\vec{b}|}\\[0.5em]
\end{align*} ∣ a ∣ ⋅ ∣ b ∣ a ⋅ b = ( a ⋅ b ) ⋅ ∣ a ∣ ⋅ ∣ b ∣ 1 = a ⋅ ∣ a ∣ 1 ⋅ b ⋅ ∣ b ∣ 1 = ∣ a ∣ a ⋅ ∣ b ∣ b Hence, the cosine of the angle between a ⃗ \vec{a} a b ⃗ \vec{b} b
cos ( Θ ) = a ⃗ ∣ a ⃗ ∣ ⋅ b ⃗ ∣ b ⃗ ∣ \begin{align*}
\cos(\Theta) = \frac{\vec{a}}{|\vec{a}|} \cdot \frac{\vec{b}}{|\vec{b}|}\\[0.5em]
\end{align*} cos ( Θ ) = ∣ a ∣ a ⋅ ∣ b ∣ b is simply the dot product of the corresponding unit vectors.
Referring back to the introductory example involving the unit circle, observe that ∣ a ⃗ ∣ = ∣ b ⃗ ∣ = 1 |\vec{a}| = |\vec{b}| = 1 ∣ a ∣ = ∣ b ∣ = 1
a ⃗ ⋅ b ⃗ = cos ( Θ ) ⋅ ∣ a ⃗ ∣ ∣ b ⃗ ∣ = cos ( Θ ) ⋅ 1 = cos ( Θ ) \begin{align*}
\vec{a} \boldsymbol{\cdot} \vec{b} = \cos(\Theta) \cdot |\vec{a}||\vec{b}| = \cos(\Theta) \cdot 1 = \cos(\Theta)
\end{align*} a ⋅ b = cos ( Θ ) ⋅ ∣ a ∣∣ b ∣ = cos ( Θ ) ⋅ 1 = cos ( Θ ) Using the usual mathematical notation for unit vectors, this can be written as
a ^ ⋅ b ^ = cos ( Θ ) \hat{a} \boldsymbol{\cdot} \hat{b} = \cos(\Theta) a ^ ⋅ b ^ = cos ( Θ ) Proofs
Proof 1
Let a ⃗ , b ⃗ ∈ R 2 \vec{a}, \vec{b} \in \mathbb{R}^2 a , b ∈ R 2 a ⃗ ⋅ a ⃗ = 1 \vec{a} \cdot \vec{a} = 1 a ⋅ a = 1 b ⃗ ⋅ b ⃗ = 1 \vec{b} \cdot \vec{b} = 1 b ⋅ b = 1 a ⃗ ⋅ b ⃗ = 0 \vec{a} \boldsymbol{\cdot} \vec{b} = 0 a ⋅ b = 0
Claim : There exists no v ⃗ \vec{v} v v ⃗ ≠ a ⃗ \vec{v} \neq \vec{a} v = a v ⃗ ⋅ v ⃗ = 1 \vec{v} \cdot \vec{v} = 1 v ⋅ v = 1 v ⃗ ⋅ b ⃗ = 0 \vec{v} \cdot \vec{b} = 0 v ⋅ b = 0
Disproof by counterexample :
Choose
a ⃗ = ( 1 0 ) \vec{a} = \begin{pmatrix} 1 \\ 0 \end{pmatrix} a = ( 1 0 ) b ⃗ = ( 0 1 ) \vec{b} = \begin{pmatrix} 0 \\ 1 \end{pmatrix} b = ( 0 1 ) v ⃗ = ( − 1 0 ) \vec{v} = \begin{pmatrix} -1 \\ 0 \end{pmatrix} v = ( − 1 0 )
Clearly, v ⃗ ≠ a ⃗ \vec{v} \neq \vec{a} v = a v ⃗ ⋅ v ⃗ = ( − 1 ⋅ − 1 ) + ( 0 ⋅ 0 ) = 1 \vec{v} \cdot \vec{v} = (-1 \cdot -1) + (0 \cdot 0) = 1 v ⋅ v = ( − 1 ⋅ − 1 ) + ( 0 ⋅ 0 ) = 1
a ⃗ ⋅ b ⃗ = ( 1 ⋅ 0 ) + ( 0 ⋅ 1 ) = 0 \vec{a} \boldsymbol{\cdot} \vec{b} = (1 \cdot 0) + (0 \cdot 1) = 0 a ⋅ b = ( 1 ⋅ 0 ) + ( 0 ⋅ 1 ) = 0 v ⃗ ⋅ b ⃗ = ( − 1 ⋅ 0 ) + ( 0 ⋅ 1 ) = 0 \vec{v} \cdot \vec{b} = (-1 \cdot 0) + (0 \cdot 1) = 0 v ⋅ b = ( − 1 ⋅ 0 ) + ( 0 ⋅ 1 ) = 0
This contradicts the assumption that no such vector v ⃗ \vec{v} v a ⃗ ≠ v ⃗ \vec{a} \neq \vec{v} a = v b ⃗ ⋅ v ⃗ = 0 \vec{b} \cdot \vec{v} = 0 b ⋅ v = 0 □ \Box □
Proof 2
Let a ⃗ , b ⃗ ∈ R 2 \vec{a}, \vec{b} \in \mathbb{R}^2 a , b ∈ R 2 a ⃗ ⋅ a ⃗ = 1 \vec{a} \cdot \vec{a} = 1 a ⋅ a = 1 b ⃗ ⋅ b ⃗ = 1 \vec{b} \cdot \vec{b} = 1 b ⋅ b = 1 a ⃗ ⋅ b ⃗ = 0 \vec{a} \boldsymbol{\cdot} \vec{b} = 0 a ⋅ b = 0
Claim : There exists a v ⃗ \vec{v} v v ⃗ ⋅ v ⃗ = 1 \vec{v} \cdot \vec{v} = 1 v ⋅ v = 1 v ⃗ ⋅ a ⃗ = 0 \vec{v} \cdot \vec{a} = 0 v ⋅ a = 0 v ⃗ ⋅ b ⃗ = 0 \vec{v} \cdot \vec{b} = 0 v ⋅ b = 0
Proof by contradiction :
It is clear that a ⃗ , b ⃗ \vec{a}, \vec{b} a , b a ⃗ ⋅ b ⃗ ≠ 0 \vec{a} \boldsymbol{\cdot} \vec{b} \neq 0 a ⋅ b = 0
Lemma 1:
a ⃗ \vec{a} a b ⃗ \vec{b} b orthonormal basis of R 2 \mathbb{R}^2 R 2
Proof of Lemma 1 :
For a ⃗ \vec{a} a b ⃗ \vec{b} b v ⃗ \vec{v} v
a ⃗ ⋅ a ⃗ = ( a x ⋅ a x ) + ( a y ⋅ a y ) = a x 2 + a y 2 = a x 2 + a y 2 ⋅ a x 2 + a y 2 = ∥ a ∥ 2 \vec{a} \cdot \vec{a} = (a_x \cdot a_x) + (a _y \cdot a_y) = a^2_x + a^2_y = \sqrt{a^2_x + a^2_y} \cdot \sqrt{a^2_x + a^2_y} = \|a\|^2 a ⋅ a = ( a x ⋅ a x ) + ( a y ⋅ a y ) = a x 2 + a y 2 = a x 2 + a y 2 ⋅ a x 2 + a y 2 = ∥ a ∥ 2
Because of a ⃗ ⋅ a ⃗ = 1 \vec{a} \cdot \vec{a} = 1 a ⋅ a = 1 1 = 1 \sqrt{1} = 1 1 = 1 a ⃗ \vec{a} a b ⃗ \vec{b} b R 2 \mathbb{R}^2 R 2 □ \Box □
Thus, we can write v ⃗ \vec{v} v linear combination of a ⃗ \vec{a} a b ⃗ \vec{b} b
v ⃗ = x a ⃗ + y b ⃗ \vec{v} = x\vec{a} + y\vec{b} v = x a + y b
We now show that
v ⃗ ⋅ a ⃗ = 0 \vec{v} \cdot \vec{a} = 0 v ⋅ a = 0
v ⃗ ⋅ b ⃗ = 0 \vec{v} \cdot \vec{b} = 0 v ⋅ b = 0
cannot hold:
v ⃗ \vec{v} v a ⃗ \vec{a} a b ⃗ \vec{b} b R 2 \mathbb{R}^2 R 2 v ⃗ \vec{v} v v ⃗ \vec{v} v 0 ⃗ \vec{0} 0 contrary to the assumption that v ⃗ ⋅ v ⃗ = 1 \vec{v} \cdot \vec{v} = 1 v ⋅ v = 1 v ⃗ ≠ 0 ⃗ \vec{v} \neq \vec{0} v = 0
Additionally, note how v ⃗ \vec{v} v a ⃗ \vec{a} a b ⃗ \vec{b} b
v ⃗ = x a ⃗ + y b ⃗ \vec{v} = x\vec{a} + y\vec{b} v = x a + y b
For v ⃗ ⋅ a ⃗ = 0 \vec{v} \cdot \vec{a} = 0 v ⋅ a = 0 v ⃗ ⋅ b ⃗ = 0 \vec{v} \cdot \vec{b} = 0 v ⋅ b = 0 v ⃗ \vec{v} v a ⃗ \vec{a} a b ⃗ \vec{b} b
Since a ⃗ ≠ 0 \vec{a} \ne 0 a = 0 v ⃗ ⋅ a ⃗ = 0 \vec{v} \cdot \vec{a} = 0 v ⋅ a = 0 x = 0 x = 0 x = 0 v ⃗ = y b ⃗ \vec{v} = y \vec{b} v = y b v ⃗ ⋅ b ⃗ = 0 \vec{v} \cdot \vec{b} = 0 v ⋅ b = 0 y = 0 y = 0 y = 0 b ⃗ ≠ 0 ⃗ \vec{b} \ne \vec{0} b = 0 v ⃗ \vec{v} v 0 ⃗ \vec{0} 0
□ \Box □